topical media & game development




PDF
a platform for intelligent multimedia
We have developed a platform for
intelligent multimedia,
based on distributed logic programming (DLP) and X3D/VRML.
See
[Platform].
Now, before giving a more detailed description of the platform,
let's try to provide a tentative definition of
intelligent multimedia.
intelligent multimedia
... intelligent multimedia provides a merge
between technology from AI, in particular agent-technology,
and multimedia ...
However shallow this definition might be, it does indicate
that we are in a multidisciplinary field of research
that investigates how we may approach multimedia in a novel manner,
using knowledge technology developed in Artificial Intelligence.
More pragmatically,
intelligent multimedia
characterizes a programmatic approach to multimedia
making use of high-level declarative languages, in opposition
to low-level third generation and scripting languages, to reduce
the programming effort involved in developing (intelligent)
multimedia systems.
Does this make the application themselves more intelligent?
Not necessarily.
In effect, nothing can be done that could not have been done
using the available programmatic interfaces.
However, we may argue that the availability of a suitable
programming model makes the task (somewhat or significantly) easier.
In our Multimedia Authoring II course, students become
familiar with our intelligent multimedia
technology.
Multimedia Authoring II -- virtual environments
- intelligent services in virtual environments
Knowledge of Web3D/VRML,
as taught in Multimedia Authoring I, is a prerequisite.
The course gives a brief introduction to logic
programming in Prolog and DLP and
then continues with building virtual
environments using agent-technology to control
the dynamic aspects of these environments.
distributed logic programming
The language DLP has a respectable history.
It was developed at the end of the 1980s, [DLP],
and was implemented on top of Java at the end of the 1990s.
In retrospect, the language turned out to
be an agent-programming language avant la lettre.
What does it offer?
In summary:
DLP
- extension of Prolog
- (distributed) objects
- non-logical instance variables
- multiple inheritance
- multi-threaded objects
- communication by rendez-vous
- (synchronization) accept statements
- distributed backtracking
Basically, the language is a distributed object-oriented extension
of Prolog.
It supports multiple inheritance, non-logical instance
variables and multi-threaded objects (to allow for distributed
backtracking).
Object methods are collections of clauses.
Method invocation is dealt with as communication by rendez-vous,
for which synchronization conditions may be specified in
so-called accept statements.
As indicated above,
the current implementation of DLP is built on top of Java.
See [OO], appendix E
for more details.
DLP+X3D platform
Our platform is the result of merging VRML
with the distributed logic programming language DLP,
using the VRML External Authoring Interface.
This approach allows for a clear separation of concerns,
modeling 3D content on the one hand and determining the
dynamic behavior on the other hand.
As a remark, recently we have adopted X3D as our 3D format.
The VRML profile of X3D is an XML encoding of VRML97.
To effect an interaction between the 3D content
and the behavioral component written in DLP,
we need to deal with two issues:
DLP+X3D
- control points: get/set -- position, rotation, viewpoint
- event-handling -- asynchronous accept
We will explain each of these issues separately below.
In addition, we will indicate how multi-user environments
may be realized with our technology.
control points
The control points are actually nodes in the VRML scenegraph
that act as handles which may be used to manipulate the scenegraph.
In effect, these handles are exactly the nodes that may act as the
source or target of event-routing in the 3D scene.
As an example, look at the code fragment below,
which gives a DLP rule to determine whether a soccer player
must shoot:
soccer rule
findHowToReact(Agent,Ball,Goal,shooting) :-
get(Agent,position,sfvec3f(X,Y,Z)),
get(Ball,position,sfvec3f(Xb,Yb,Zb)),
get(Goal,position,sfvec3f(Xg,Yg,Zg)),
distance(sfvec3f(X,Y,Z),sfvec3f(Xb,Yb,Zb),DistB),
distance(sfvec3f(X,Y,Z),sfvec3f(Xg,Yg,Zg),DistG),
DistB =< kickableDistance,
DistG =< kickableGoalDistance.
This rule will only succeed when the actual distance
of the player to the goal and to the ball
satisfies particular conditions, see section [7-3].
In addition to observing the state of the 3D scene
using the get predicate,
changes to the scene may be effected using the set
predicate.
event handling
Our approach also allows for changes in the scene that
are not a direct result of setting attributes
from the logic component.
Therefore we need some way to intercept events.
In the example below, we have specified an observer object
that has knowledge of, that is inherits from, an object
that contains particular actions.
observer
:- object observer : [actions].
var slide = anonymous, level = 0, projector = nil.
observer(X) :-
projector := X,
repeat,
accept( id, level, update, touched),
fail.
id(V) :- slide := V.
level(V) :- level := V.
touched(V) :- projectortouched(V).
update(V) :- act(V,slide,level).
:- end_object observer.
The constructor sets the non-logical variable projector
and enters a repeat loop to accept
any of the incoming events for respectively id,
level, update and touched.
Each event has a value, that is available as a parameter
when the corresponding method is called on the acceptance
of the event.
To receive events, the observer object
must be installed as the listener for these particular events.
The events come from the 3D scene.
For example, the touched event results from mouse clicks
on a particular object in the scene.
On accepting an event, the corresponding method or clause
is activated, resulting in either changing the value
of a non-logical instance variable,
invoking a method,
or delegating the call to another object.
An observer of this kind is used in the system described below,
to start a comment (dialog) on the occurrence of a particular slide.
case studies
To illustrate the potential of our DLP+X3D platform,
we will briefly sketch two additional case studies deploying embodied
agents, respectively
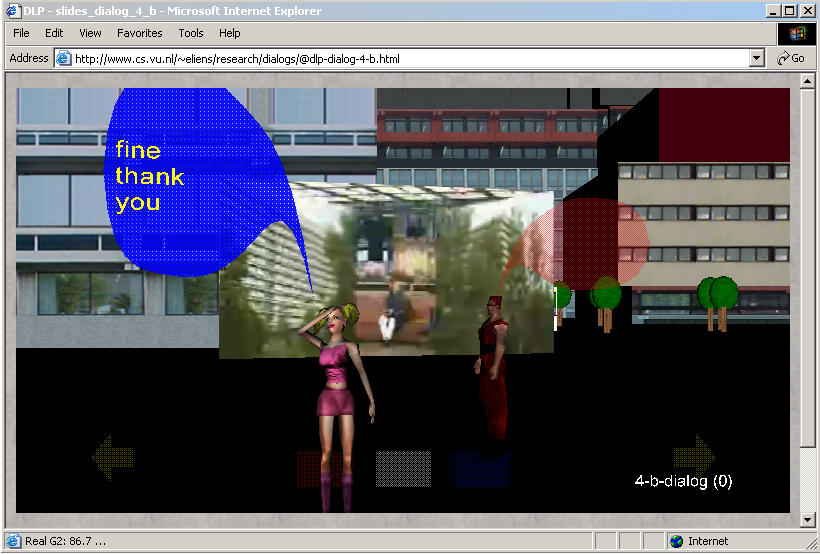
the use of dialogs in VR presentations (fig. a),
and a scripting language for specifying
gestures and movements for humanoids (fig. b).
...
dialogs in virtual environments
Desktop VR is an excellent medium for presenting information,
for example in class, in particular when rich media
or 3D content is involved.
At VU, I have been using presentational VR
for quite some time, and recently I have included dialogs
using balloons (and possibly avatars) to display the text
commenting on a particular presentation.
See figure (b) for an example displaying a virtual
environment of the VU, a propaganda movie for attracting
students, and two avatars commenting on the scene.
The avatars and their text are programmed as
annotations to a particular scene as described below.
Each presentation is organized as a sequence of slides,
and dependent on the slides (or level within the slide)
a dialog may be selected and displayed.
See the observer fragment presented above.
Our annotation for dialog text in slides looks as follows:
dialog
<phrase right="how~are~you">
<phrase left="fine~thank~you"/>
<phrase right="what do~you think~of studying ..."/>
...
<phrase left="So,~what~are you?"/>
<phrase right="an ~agent" style="[a(e)=1]"/>
<phrase left="I always~wanted to be~an agent" style="[a(e)=1]"/>
In figure (b), you see the left avatar (named cutie) step forward
and deliver her phrase. This dialog continues until cutie remarks that she always wanted to be an agent.
The dialog is a somewhat ironic comment on the contents of
the movie displayed, which is meant to introduce the VU to
potential students. Clearly, our approach is reminiscent
to the notorious Agneta & Frida characters
developed in the Persona project.
See the research directions of section [3-3].
Furthermore, there are a number of style parameters
to be dealt with to decide for example
whether the avatars or persona are visible, where to place
the dialogs balloons on the display, as well as the color
and transparancy of the balloons.
To this end, we have included a style attribute
in the phrase tag, to allow for setting
any of the style parameters.
style parameters
<phrase right="red" style="[p=(0.5,0,0),persona=0,balloon=0]"/>
<phrase left="cutie" style="[p=(-0.5,0,0),persona=0,balloon=0]"/>
<gesture right=1 style=default/>
<gesture left=1 style=default/>
Apart from phrases, we also allow for gestures, taken from
the built-in repertoire of the avatars.
Below we discuss how to extend the repertoire
of gestures, using a gesture specification language.
Both phrases and gestures are compiled into DLP code
and loaded when the annotated version of the presentation VR
is started.
design issues
levels of complexity
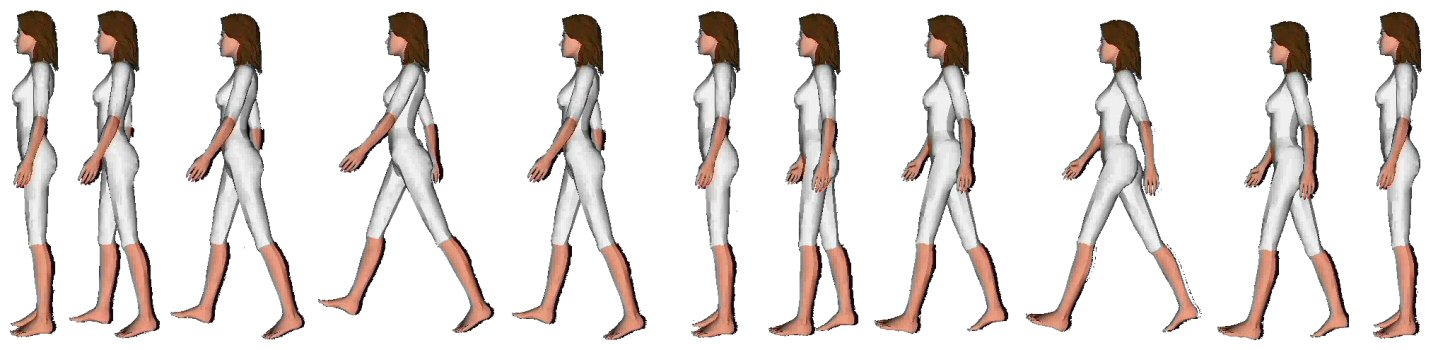
STEP -- a scripting language for embodied agents
Given the use of humanoid avatars to comment on the
contents of a presentation, we may wish to enrich
the repertoire of gestures and movements to be able,
for example, to include gestural comments or even
instructions by gestures.
Recently, we have started working on a scripting language for
humanoids based on dynamic logic.
The STEP scripting language consists of basic actions,
composite operators and interaction operators (to deal
with the environment in which the movements and actions take place).
The basic actions of STEP consist of:
basic actions
- move -- move(Agent,BodyPart,Direction,Duration)
- turn -- turn(Agent,BodyPart,Direction,Duration)
These basic actions are translated into operations
on the control points as specified by the H-Anim 1.1 standard.
As composite operators we provide sequential and parallel
composition, as well as choice and repeat.
These composite operators take both basic actions and user-defined
actions as parameters.
composite operators
- sequence -- [Action_1,...,Action_{n}]
- parallel -- parallel([Action_1,...,Action_{n}])
- choice -- disjunct([Action_1,...,Action_{n}])
- repeat -- repeat(Action,k)
Each action is defined using the script,
by specifying an action list containing
the (possibly compound) actions of which that particular
action consists.
As an example, look at the definition of walking below.
example
script(walk(Agent), ActionList) :-
ActionList = [
parallel([turn(Agent,r_shoulder,back_down2,fast),
turn(Agent,r_hip,front_down2,fast),
turn(Agent,l_shoulder,front_down2,fast),
turn(Agent,l_hip,back_down2,fast)]),
parallel([turn(Agent,l_shoulder,back_down2,fast),
turn(Agent,l_hip,front_down2,fast),
turn(Agent,r_shoulder,front_down2,fast),
turn(Agent,r_hip,back_down2,fast)])
], !.
Notice that the Agent that is to perform the
movement is given as a parameter.
(Identifiers starting with a capital act as a logical parameter
or variable in Prolog and DLP.)
...
Interaction operators are needed to conditionally
perform actions or to effect changes within the environment
by executing some command.
Our interaction operators include:
test, execution, conditional
and until.
interaction
- test -- test(State)
- execution -- do(State)
- conditional -- if_then_else(State,Action1,Action2)
- until -- until(Action,State)
Potentially, an action may result in many parallel
activities.
To control the number of threads used for an action,
we have created a scheduler that assigns
activities to a thread from a thread pool consisting
of a fixed number of threads.
As a demonstrator for STEP, we have created
an instructional VR for Tai Chi,
the Chinese art of movement.
XML encoding
Since we do not wish to force the average user
to learn DLP to be able to define scripts in STEP,
we are also developing XSTEP, an XML encoding for STEP.
We use seq and par tags as found in
SMIL,
as well as gesture tags with appropriate attributes
for speed, direction and body parts involved.
As an example, look at the XSTEP specification
of the walk action.
XSTEP
<action type="walk(Agent)">
<seq>
<par speed="fast">
<gesture type="turn" actor="Agent" part="r_shoulder" dir="back_down2"/>
...
</par>
<par speed="fast">
...
<gesture type="turn" actor="Agent" part="r_hip" dir="back_down2"/>
</par>
</seq>
</action>
Similar as with the specification of dialog phrases,
such a specification is translated into the corresponding
DLP code, which is loaded with the scene it belongs to.
For XSTEP we have developed an XSLT stylesheet, using
the Saxon package, that transforms an XSTEP specification into DLP.
We plan to incorporate XML-processing capabilities in DLP,
so that such specifications can be loaded dynamically.
related work
There is an enormous amount of research dealing with
virtual environments that are in one way or another
inhabited by embodied agents.
By way of comparison, we will discuss a limited number of
related research projects.
As systems that have a comparable scope we may mention
[Environments] and DIVE, that both have a client-server
architecture for realizing virtual environments.
Our DLP+X3D platform distinguishes itself from these
by providing a uniform programmatic interface, uniform
in the sense of being based on DLP throughout.
The Parlevink group at the Dutch University of Twente
has done active research in applications of virtual
environments with agents.
Their focus is, however, more on language processing,
whereas our focus may be characterized as
providing innovative technology.
Both [Jinni] and [Scripts] deal with incorporating
logic programming within VRML-based scenes, the former
using the External Authoring Interface, and the latter
inline logic scripts.
Whereas our platform is based on distributed objects,
Jinni
deploys a distributed blackboard to effect multi-user synchronisation.
Our scripting language may be compared to
the scripting facilities offered by
Alice,
which are built on top of Python.
Also, Signing Avatar has a powerful scripting language.
However, we wish to state that our scripting language is
based on dynamic logic, and has powerful abstraction
capabilities and support for parallelism.
Finally, we seem to share a number of interests
with the VHML community,
which is developing a suite of markup languages
for expressing humanoid behavior.
We see this activity as complementary to ours,
since our research proceeds from
technical feasibility,
that is how we can capture the semantics of
humanoid gestures and movements within
our dynamic logic,
which is implemented on top of DLP.
future research
PRO
- high level platform -- flexible and powerful
- clean separation of concerns -- modelling and programming
CON
- added complexity -- due to hybrid platform
- performance penalty -- due to EAI communication
TODO
- models -- movement, behavior, moods
- mark up -- dialogs, actions, style
- support -- text-to-speech, interaction
www.cs.vu.nl/~eliens/research
In summary, we may state that our DLP+X3D platform is a powerful,
flexible and high-level platform for developing
VR applications with embodied agents.
It offers a clean separation of modeling and programming concerns.
On the negative side, we should mention that
this separation may also make development more complex
and, of course, that there is a (small) performance penalty
due to the overhead incurred
by using the External Authoring Interface.
Where our system is currently lacking, clearly,
is adequate computational models underlying humanoid behavior,
including gestures, speech and emotive characteristics.
The VHML effort seems to have a rich offering that we need
to digest in order to improve our system in this respect.
Our choice to adopt open standards, such as XML-based X3D,
seems to be benificial, in that it allows us to profit
from the work that is being done in other communities,
so that we can enrich our platform with the functionality
needed to create convincing embodied agents
in a meaningful context.
(C) Æliens
18/6/2009
You may not copy or print any of this material without explicit permission of the author or the publisher.
In case of other copyright issues, contact the author.
{kind=link}
{kind=link}